设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:高分子科学前沿|
发表时间:2023-04-17
点击:2619
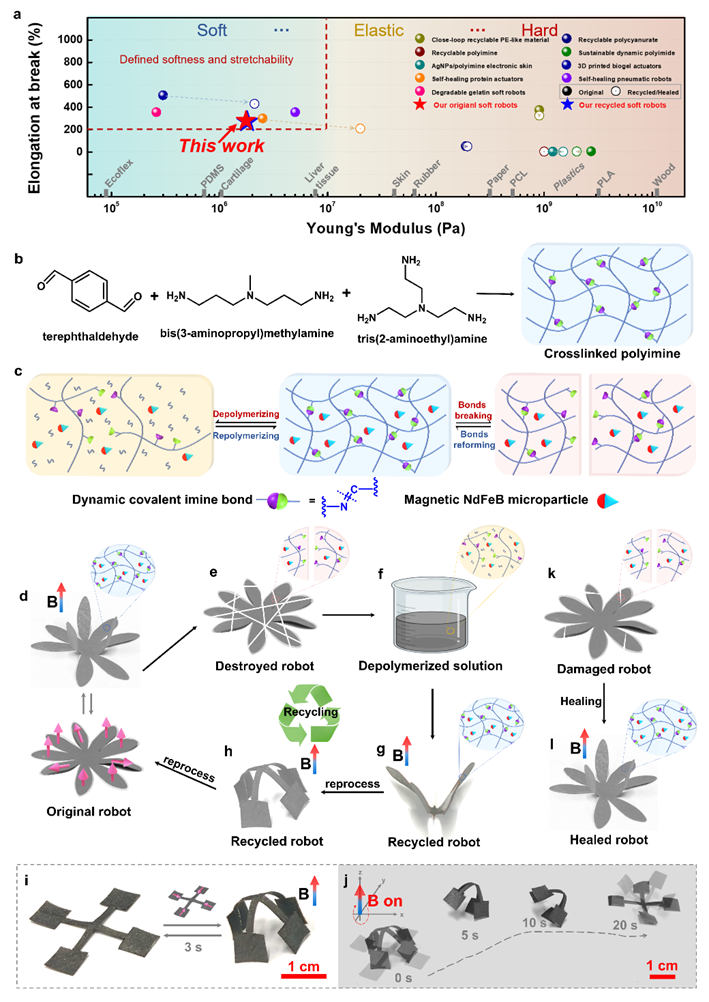
磁性软体机器人能够通过无线磁场远程控制其变形和运动行为,主要由作为基体的软聚合物和作为填料的磁性颗粒组成。磁性软体机器人具有优异的柔韧性和伸展性,可以在狭窄的空间内快速变形和运动,这使其能够用于多种不同的应用,如侵入性手术和定向药物输送。这种复杂的变形能力在很大程度上取决于聚合物基体的柔软度和延展性,因此软体机器人一般要求材料的杨氏模量在0.1-10 MPa之间,并具有>200%的高拉伸性(图1a)。这使得有限的弹性材料可以作为软体机器人的基体材料,如广泛报道的PDMS、Ecoflex和水凝胶材料。软体机器人独特的柔软性使其在复杂的使用环境中容易受到尖锐物体等的损害,但由于PDMS和Ecoflex是共价交联的热固性聚合物材料,导致相应的软体机器人在破损后一般不能再加工或回收,可能会被当作废物处理,从而对环境造成潜在威胁。
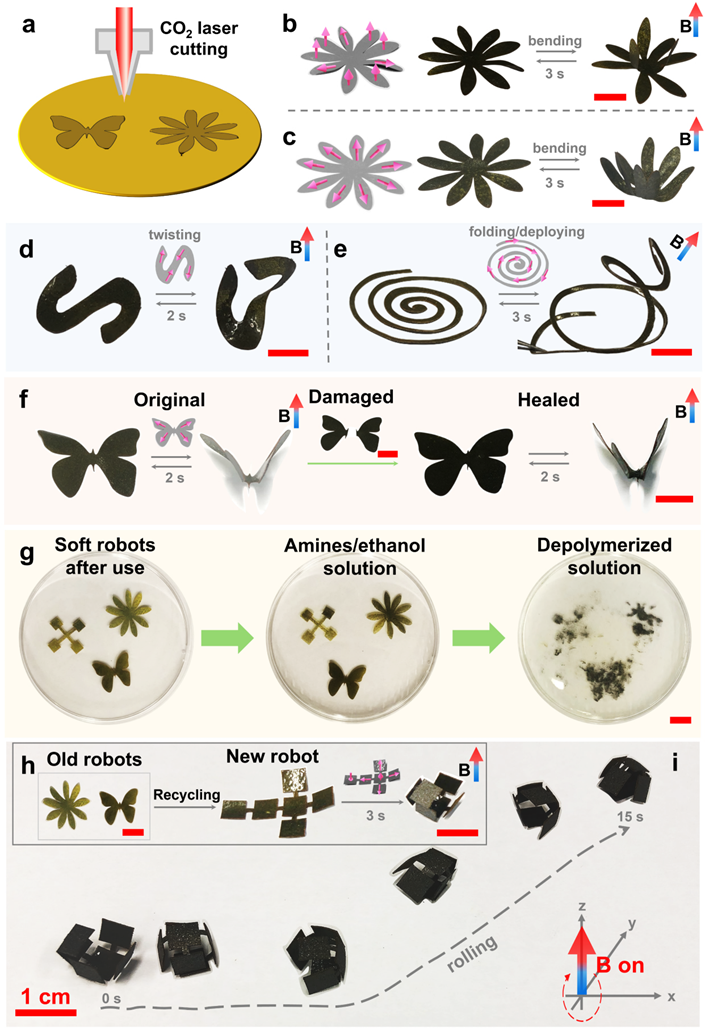
近日,香港中文大学张立教授课题组以软性动态共价聚酰亚胺为聚合物基体,以磁性颗粒为填料制备了磁性软体机器人,首次将化学可回收性、室温可修复性、多模态变形和运动整合到一个磁性软体机器人中(图1)。研究人员开发的动态聚酰亚胺具有足够的柔软性和伸展性,可以通过简单的激光切割加工出各种几何形状的软体机器人,而不需要预先设计出符合目标场景的几何形状。通过循环解聚/再聚合的回收策略,可以使机器人的机械性能和快速变形/移动性100%恢复到原来的水平,实现了软体机器人在不同场景下的循环应用(图2)。这项工作以“Fully Recyclable, Healable, Soft, and Stretchable Dynamic Polymers for Magnetic Soft Robots”为题发表在Advanced Functional Materials上。
图1.磁性软体机器人设计
图2. 可回收和可修复的磁性软体机器人展示
封面来源于图虫创意

“本文由新材料在线®平台入驻媒体号高分子科学前沿提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”